|
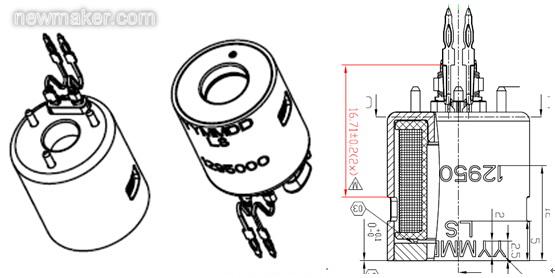
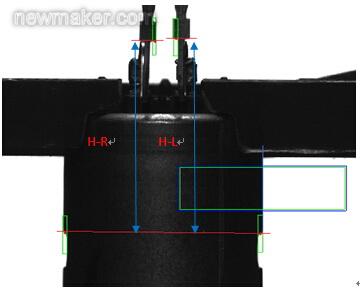
1 前言 汽车零部件作为汽车工业的基础,是支撑汽车工业持续健康发展的必要因素。当前汽车行业正在轰轰烈烈、如火如荼地开展自主开发与创新,更需要一个强大的零部件体系作支撑,接踵而至的是汽车零部件的安全性、可靠性等问题——汽车零部件尺寸检测成为必不可少的选择。 目前市面上对于汽车零件的测量方法有很多种,但从检测效率及检测精度方面综合考虑,基于机器视觉的测量方式以其便捷而精确得检测优势越来越多的被广大零部件制造厂商所青睐。 台达DMV 机器视觉系统,具有高速精准、多任务运算处理能力和智能型、人性化的操作接口,可广泛应用于食品、饮料、医药及包装等行业的识别确认、坐标定位、测量计数、瑕疵检测等领域。 本方案中,客户需要测量汽车上某一零部件的几项尺寸参数,如图1所示。
机器视觉需要检测出图1零件中红色标出的尺寸大小——左右针高度,同时检测两条PIN的位置度和垂直度;其中位置度是通过测量左右两个PIN脚与标准位置的偏移量得出,测量精度为0.2mm。 专业研发、生产、销售:测漏机,检漏机,试漏机,测漏仪,塑料瓶装袋机,垫片冲裁入盖机,客服热线:13929416960. 根据客户提出的要求,综合考虑各个检测点,需要两台相机分别从两个方向“观看”才能全部检测,因此整体方案需要一套台达一拖二DMV机器视觉系统来实现。
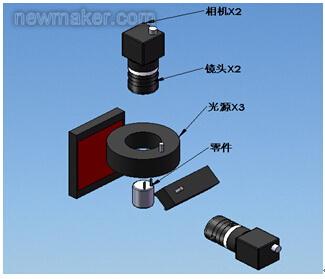
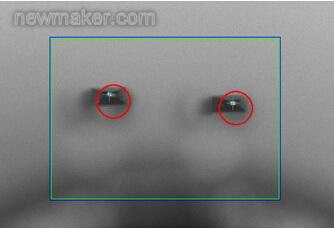
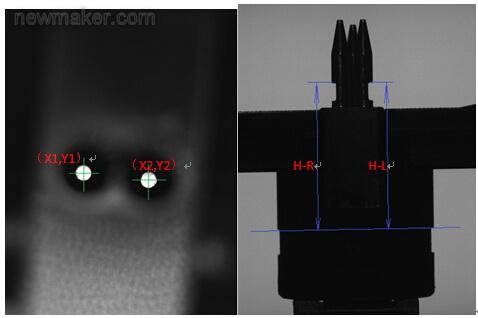
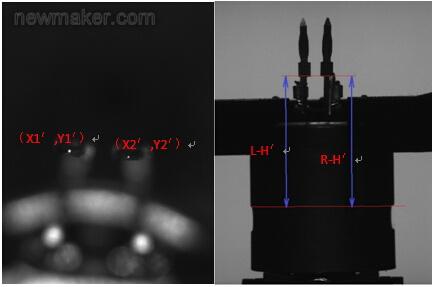
3 检测原理 图3中,下方相机通过环形上光源对零件的PIN照射,因零件两个PIN脚顶部比较圆滑,所以经光源照射后会呈现两个亮点(如图4),然后从DMV控制器算法库里选用“斑点”工具对两个亮点的位置分别进行分析,使得到的两个坐标值与标准位置坐标值相比较计算出两个PIN脚的偏移量DL、DR,即为位置度。
由于本案属于高精度尺寸测量,因此在每次正式测量前需先对设备进行校正,即DMV首先运行校正程序(操作工手动操作),对标准样件(尺寸最标准的样件)进行拍照取像,将计算分析得出的参数存入DMV检测系统,以提高系统检测精度。 4.1 校正程序 主要目的是计算像素与实际尺寸的比例关系,同时也会把标准样件左右针的坐标值存入内存,作为后面检测程序计算的参考点。 运行校正程序,获取标准样件截图如图6所示。
K计算公式如下:K值=被测物实际尺寸(mm)/相机测得像素数(Pixle)。 根据两个相机测得像素值与零件实际尺寸的比例关系,K1、K2值计算结果如下: K1=16.72mm/452pixel=0.03mm/pixle(一个像素值代表0.03mm); K2=2.54mm/278pixel=0.01mm/pixle(一个像素值代表0.01mm); 在本方案中,校正程序同时会将标准件左右针的标准位置坐标值(X1,Y1)、(X2,Y2)存入DMV内存,以作为后面位置度计算的参考点。 4.2 检测程序 系统校正完毕,运行检测程序开始检测。
4.3 验收数据 通过以下10组验收数据分析DMV的测量精度,得出该方案完全可以满足客户要求的0.2mm的检测精度,DMV实际测量误差只有0.02mm。
表1 验收数据 (单位:mm)
表2 系统配置 在零部件尺寸测量的应用领域中,台达DMV视觉检测系统为一些追求高效、高品质的生产厂商提供了最优质的检测方案,满足了客户更高速、更便捷、更精准的测量需要,解决制造业发展中又一个瓶颈技术。(end) |
语言版本选择: